Robotic surgery for microvascular decompression in hemifacial spasm: a feasibility study
Article information

Abstract
Objective
The gold-standard treatment modality for hemifacial spasm is microvascular decompression (MVD) via microsurgery. Recently, endoscopic surgery has been attempted by many surgeons. The present study investigated the feasibility of robotic surgery for MVD to treat hemifacial spasm.
Methods
The study was conducted using the da Vinci Xi model, and a three-dimensional model was purchased and applied. The advantages and disadvantages of microsurgery, endoscopic surgery, and robotic surgery were compared.
Results
In robotic surgery, the root exit zone can be viewed from various angles by magnifying it, similarly to the endoscope and better than the microscope. However, there is a limit to performing versatile manipulations because various tools are not available. When robotic surgery is used, the camera can be applied more stably and compensate for any tremor in the surgeon’s hand, likely making surgery safer.
Conclusion
Currently, the approaches for MVD using robotic surgery are limited in their application. However, when optimal tools are developed, it is expected that they can be applied as an effective treatment modality for MVD to treat hemifacial spasm.
INTRODUCTION
The development of surgical tools and techniques is gradually changing to focus on minimally invasive surgery. Social demands are changing similarly. In neurosurgery, microsurgery through craniotomy is the current standard modality. Recently, minimally invasive surgery using an endoscope has received increased attention. However, the shift to using a robot in neurosurgery is relatively slow compared with its use in abdominal and pelvic surgeries. The most common cranial surgery using the endoscope is endoscopic endonasal skull base surgery including pituitary surgery. However, robotic surgery was attempted on a lesion in the sellar region but had several limitations [1,2]. Similar to endonasal surgery, endoscopes are applied in microvascular decompression (MVD) surgery. Many surgeons are performing MVD surgery using an endoscope and reporting very positive results [3-7]. However, attempts at robotic surgery in MVD have not been reported.
Therefore, the authors were curious about how robotic surgery could be applied to MVD in patients with hemifacial spasms. A feasibility study was conducted using a three-dimensional (3D) model. The advantages and disadvantages were compared among microsurgery, endoscopic surgery, and robotic surgery.
MATERIALS AND METHODS
This study used a robotic surgery module with a commercialized 3D model. Robotic-assisted surgery for intracranial lesions has not been approved by the Food and Drug Administration (FDA) yet. The robot is not licensed for neurosurgical procedures in Korea, and research on cadavers using a robot is also prohibited. Consequently, a 3D model was used for a preliminary study. A commercialized 3D model (RetrosigmoidBox, UpSurgeOn; www.upsurgeon.com) was purchased online. In previous studies, this model was shown to be suitable for neurosurgical education [8-10]. The model consists of a 3D-printed plastic skull and a silicone brain model including cranial nerves and vessels. The model was designed for use with the conventional retrosigmoid approach, involving a craniectomy of approximately 3×2.5 cm. When the cerebellum is retracted, the cranial nerve VII–VIII complex and the low cranial nerve complex can be identified. In addition, because the VII–VIII complex is compressed by posterior inferior cerebellar artery (PICA), a training simulation of MVD for hemifacial spasm can be performed. The robot used in this study was the da Vinci Xi (Intuitive Surgical. Co.), the most common system used for robotic surgery. A rigid 30-degree endoscope camera and black diamond microforcep with 10-mm jaw length were used. All instruments were 8-mm-thick. The simulation was performed by a neurosurgeon, who received special training on the use of DaVinci Xi (Fig. 1).

Devices used in this study. (A) The da Vinci Xi console, (B) 3-dimensional printed model, and (C) black diamond microforcep.
Instruments used (Fig. 1)
The camera used for the actual surgery was 8 mm in diameter, and the lens was angled at 30 degrees. Black diamond microforcep with 8 mm in diameter were used in the simulation and wrist angulation was possible at a position 10 mm from the tip at a 30-degree jaw open angle. With gentle manipulation, a single arm and a camera were sufficient.
RESULTS
Surgical procedure (Fig. 2, Supplementary Video 1)
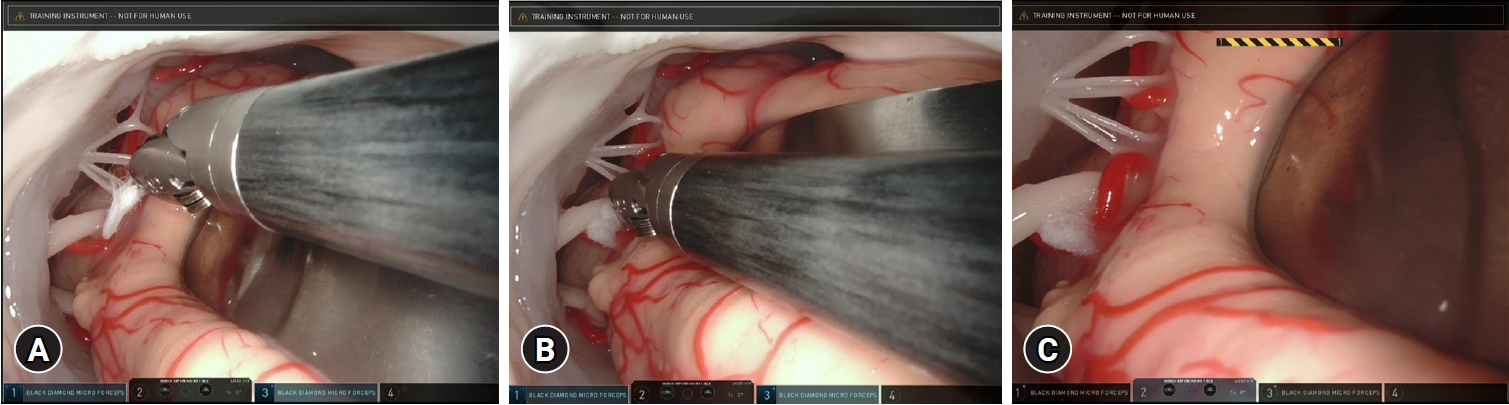
Robotic surgery for microvascular decompression. (A) Holding Teflon felt with microforcep. (B) Inserting Teflon felt into the root exit zone using microforcep. (C) Teflon felt is inserted in the root exit zone.
The 3D model was placed in the same position as in actual surgery, corresponding to the park bench position. Because the craniectomy was completed with the model, the procedure proceeded from that point. The robot's three arms were attached as close as possible to ensure a parallel trajectory, and the trocar was placed at a distance of approximately 50 cm from the model to avoid conflict between instruments. Only one camera and one tool could access the 3 cm craniectomy site of the 3D model. Even if it was parallelized as much as possible, an entry angle of about 15 degrees was required. Below that, the robot arm collided and proper manipulation was impossible. During the actual surgery, a cerebellum is sunken down after cerebrospinal fluid drainage and the operative field around the facial nerve can be observed. However, due to the simulated 3D model’s firmness compared to an actual brain, the cerebellum does not sink as it would in real surgery. Therefore, mild retraction was performed by an assistant to secure a space for the camera and instruments. First, by advancing the camera, the root exit zone (REZ) of the facial nerve was examined, and the instrument advanced in an almost parallel trajectory as the camera. The PICA branch compressing the REZ of the facial nerve was identified, and Teflon felt was inserted without retraction of the nerve. Tool mobilization by the robot system reduced physiologic tremors and enabled gentle manipulation. The simulation was finished after confirming the complete decompression of the REZ around the facial nerve.
DISCUSSION
Advances in abdominal and pelvic surgeries from laparotomy to laparoscopic surgery and robotic surgery have been gradual. In 1902, Georg Kelling performed laparoscopic surgery using dogs [11,12], and in 1910, Hans Christian Jacobaeus operated on a human [13,14]. In the early 1950s, Raoul Palmer published an article on diagnostic laparoscopy [15]. In 1981, Kurt Semm first used laparoscopy to remove an appendix [16,17]. Since then, clinical results have been obtained from many surgeons, and laparoscopy has been established as a minimally invasive surgery that can replace laparotomy. Two robotic surgical systems were introduced in the late 1990s: Zeus (Computer Motion) and da Vinci (Intuitive Surgical, Inc.). The United States FDA approved these systems after rigorous testing and validation in several specific areas [18].
In the field of neurosurgery, endoscopic surgery is currently used and gradually replacing traditional approach. The ventricular approach is used for intra-ventricular surgery, the endonasal approach for pituitary adenoma resection, and the trans-orbital approach is being utilized for lesions around the orbit and in the middle fossa [19-21]. However, in neurosurgical procedures, the reality is that they are not widely adopted due to hardware issues related to delicate manipulations in narrow spaces. Specifically, challenges arise from the manipulation of the robotic arms, simultaneous insertion of a camera, and safety issues associated with operating these devices. Therefore, previous studies concluded that it is difficult to implement in clinical practice due to these limitations [22].
In posterior fossa approaches, the endoscope is not frequently used and mainly is considered an adjunct to conventional microscopic surgical techniques. MVD surgery is another field in which an endoscope can be used instead of a microscope. Several neurosurgeons have further developed MVD techniques after its introduction by Jannetta and Tew [23]. Meanwhile endoscopic technique was applied to pituitary surgery by Jho et al. [24]. Many neurosurgeons prefer using an endoscope during MVD either as an endoscope alone (endoscopic MVD) or in combination with a microscope (endoscope-assisted MVD) [4,7,25-27]. Endoscopic MVD can provide good illumination with a panoramic view compared with conventional MVD via microsurgery. Therefore, blind spots that cannot be observed with a microscope can be identified and otherwise hidden compression can be visualized. In addition, endoscopic MVD can be performed without fixed retraction, although limitations exist, such as the two-dimensional view, lacking a sense of depth. As microscopic instruments are developed, endoscopic MVD can be performed with smaller skin incisions and craniotomy compared with previous approaches. In a meta-analysis, full endoscopic MVD was shown to provide patients with clinical results comparable with those of conventional microsurgery MVD but with lower complication rates, notably of facial palsy and hearing loss following surgery [28].
The use of a robot for MVD surgery has not been reported to date. To the best of our knowledge, the present study is the first in which a robotic attempt was presented. Because a drill has not yet been developed for robotic surgery, robots cannot be used in the skin and craniotomy stages. Currently, endoscopic MVD surgery is performed with only a very small opening. Thus, the skin incision and craniotomy size are not expected to be smaller with robotic surgery. During MVD surgery for hemifacial spasms, cerebellar retraction increases the risk of hearing loss [29]. When performing microsurgery, the folliculus has to be retracted to examine the REZ of the facial nerve. In endoscopic surgery, the REZ can be examined even with less retraction than in microscopic procedure. Especially, when inserting Teflon felt, it is difficult without retracting the cerebellum even temporarily, because the instrument is straight and has a limited range of motion. In robotic surgery, the range of motion is very large because the instrument can be angulated at the wrist and tip, and operation around the REZ can be stable and natural (Fig. 3).

Illustration for comparison among (A) microsurgery, (B) endoscopic surgery, and (C) robotic surgery. (A) Since microsurgery provides an external light source, retraction of the folliculus is necessary to check the root exit zone during surgery. (B) In endoscopic surgery, the root exit zone can be confirmed without retraction using an angled scope. However, since surgical tools operate linearly, retraction is necessary at least temporarily for decompression. (C) Because robotic surgery involves an angled camera, it is theoretically possible to check the root exit zone without retraction, and a tool with a wrist can perform decompression without retraction.
In comparison to microsurgery and endoscopic surgery, robotic surgery has several advantages (Table 1). In summary, it provides a panoramic view with 3D vision. In addition, as mentioned earlier, since the range of motion of the arm is large, surgery can be performed efficiently even in a narrow corridor. This suggests the possibility of surgery without cerebellar retraction. Of course, that limitation cannot be ignored either. In abdominal surgery currently in use, tension at the level of bowel grasping can be detected. However, haptic feedback at the delicate level encountered in the neurosurgical field is not yet available. Also, one of the big problems is that the drill has not been developed yet. In addition, there are still many difficulties in applying the 8-mm diameter tool to the neurosurgical field. The development of smaller tools is essential. The cost of purchasing a robot console and additional training and education is inevitable. And, the lack of evidence that no one has tried yet will be a hurdle we have to overcome. This study is still preliminary. The use of a 3D model might not accurately replicate the complexities of human anatomy and the dynamics of live surgery. It is expected that more studies will be conducted based on it.

Comparison of features between microscopic, endoscopic, and robotic surgery
CONCLUSION
In the present study, a 3D model demonstrated robotic surgery for MVD in patients with hemifacial spasms. Robotic MVD surgery is potentially valuable, despite the presence of numerous institutional and technical hurdles. Continued design of new methods and instruments is expected to overcome the limitations.
Notes
CONFLICTS OF INTEREST
No potential conflict of interest relevant to this article was reported.
ACKNOWLEDGMENTS
We thank Intuitive Surgical for their support for the present study.
SUPPLEMENTARY MATERIAL
Demonstration of robotic surgery for microvascular decompression in hemifacial spasm